Résumé
Modernisation d’un robot aspirateur par intégration d’un LiDAR, d’une Raspberry Pi 5 et d’une logique de navigation plus intelligente.
Automatisme, robotique et systèmes embarqués
Ce projet visait à moderniser un robot aspirateur existant en remplaçant les capteurs de fin de course traditionnels par un système LiDAR plus précis. L’objectif était d’améliorer la détection d’obstacles, de préparer une cartographie de l’environnement et de piloter les moteurs via une Raspberry Pi 5.
Modernisation d’un robot aspirateur par intégration d’un LiDAR, d’une Raspberry Pi 5 et d’une logique de navigation plus intelligente.
Le projet s’inscrit dans une démarche de modernisation d’un système embarqué réel. Il mélange automatisme, électronique, pilotage moteur, programmation et logique de navigation autonome dans un cadre concret de prototypage.
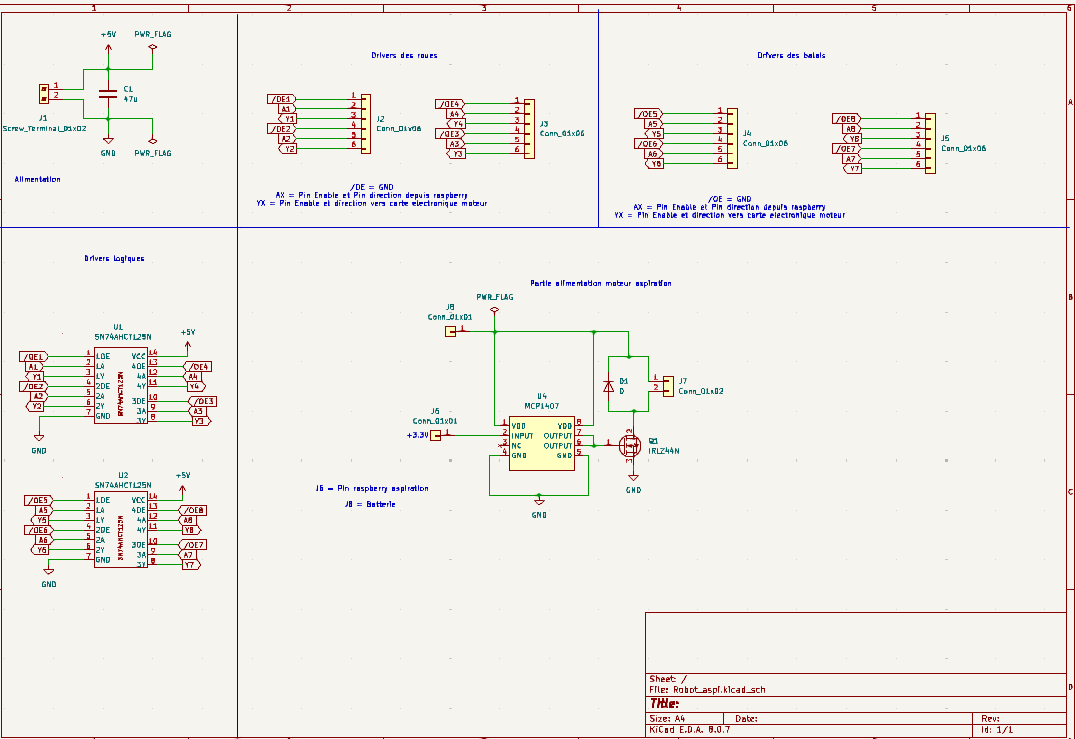
Conception électronique préparatoire du système embarqué.
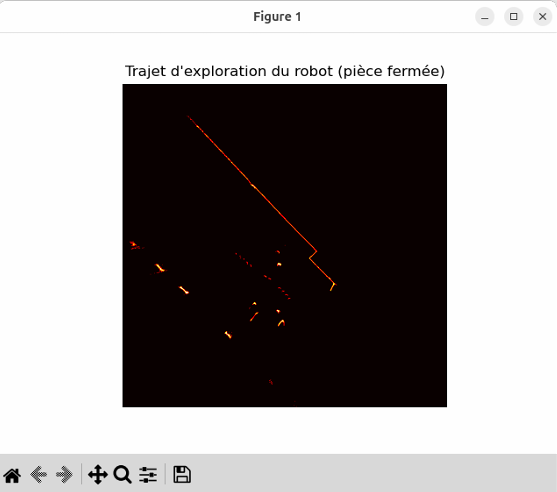
Première représentation de l’environnement détecté par le LiDAR.
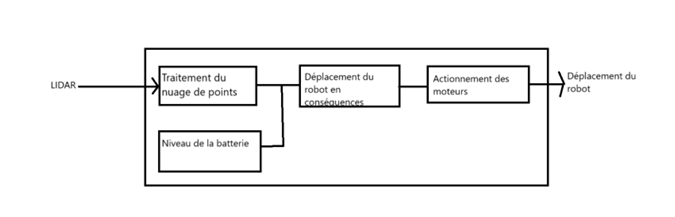
Organisation globale des blocs fonctionnels du robot.